欢迎您来到火狐直播app官方网址



发布时间:2024-04-27 08:13:33 | 作者: 火狐直播app官方网址
(1)拍数——每一次循环所包含的通电状态数(电机转过一个齿距角所需脉冲数)


当通电相的电流并不马上升到位,而断电相的电流也非立即降为0时,它们所产生的磁场合力,会使转子有一个新的平衡位置,这个新的平衡位置是在原来的步距角范围内。
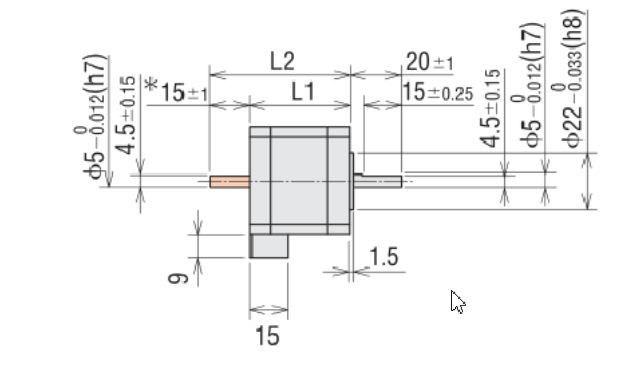
无法查找到42SHDC4040-17B型号的详细资料,以通用42步进电机为例:
![]()
TB6600步进电机驱动器升级版是一款专业的两相步进电机驱动,可实现正反转控制。通过S1,S2,S3 3位拨码开关选择7档细分控制(1,2/A,2/B,4,8,16,32,),通过S4,S5,S6 3位拨码开关选择8 档电流控制(0.5A,1A,1.5A,2A,2.5A,2.8A,3.0A,3.5A)。适合驱动57,42 型两相、四相混合式步进电机。
共阳极接法:分别将PUL+,DIR+,EN+连接到控制管理系统的电源上, 如果此电源是+5V则可直接接入,如果此电源大于+5V,则须外部另加限流电阻R,保证给驱动器内部光藕提供8—15mA 的驱动电流。
共阴极接法:分别将 PUL-,DIR-,EN-连接到控制管理系统的地端;脉冲输入信号通过PUL+接入,方向信号通过DIR+接入,使能信号通过EN+接入。若需限流电阻,限流电阻R的接法取值与共阳极接法相同。
注:EN端可不接,EN有效时电机转子处于自由状态(脱机状态),这时可以手动转动电机转轴。
注意:DC直流范围:9-32V。不可以超过此范围,否则会无法正常工作甚至损坏驱动器.
printf(rn 电机为正转模式,请输入旋转速度(rad/s),输入0返回初始模式 rn);
printf(rn 电机已旋转%d °,请输入下一次旋转角度,输入0返回初始模式; rn,angle);
printf(rn 电机为正转模式,请输入旋转速度(rad/s),输入0返回初始模式 rn);
printf(rn 电机已旋转%d °,请输入下一次旋转角度,输入0返回初始模式;rn,angle);
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);


1.在某个目录内新建工程路径,这里我命名为A03-SPORT 2.在上述上当内新建两个名为Project和User目录,前者用于存放工程文件,后者存放我们自行编写的文件 3.将从ST官网下载的库文件中的Libraries路径下所有文件复制到A03-SPORT路径内,本笔记所用的版本为V3.5.0 4.此时,A03-SPORT路径内的情况如下 5.将官方库路径内的如下文件复制到User路径内r内路径如下 7.打开Keil,Project- New Project一个工程,路径为上边新建的Project目录,命名SPORT 8.选择所用的芯片STM32F103ZE 9.是否加入由Keil生成
ZET基于KEIL环境新建工程笔记 /
1引言 随着微步进电机应用的日益广泛,其驱动电路的发展也相当迅速,各类控制芯片的功能越来越丰富,操作也慢慢变得简便。A3977是一种新近开发出来、专门用于双极型步进电机的微步进电机驱动集成电路,其内部集成了步进和直接译码接口、正反转控制电路、双H桥驱动,电流输出2.5A,最大输出功率可接近90W。它主要的设计功能包括:自动混合模式电流衰减控制,PWM电流控制,同步整流,低输出阻抗的DMOS电源输出,全、半、1/4及1/8步进操作,HOME输出,休眠模式以及易实现的步进和方向接口等。其应用电路结构相对比较简单、使用及控制方便,有着极其广泛的应用价值。 2A3977工作特点 大多数微步进电机驱动器都需要一些额外的控制线,通过
之前在网上找了一个STM32F103C8T6关于can通信的例子,直接烧录,can不可以使用, 使用示波器在VP230前后端查看没有波形, 先介绍板子硬件资源: HSE时钟:8MHz; MCU : STM32F103C8T6 CAN:一路; 在软件的配置中找不到任何原因,使用USB-CAN分析仪不能识别波特率,怀疑是不是因为波特率设置不对, 是不是硬件设计出现错误, 查找手册 《stm32f103c8t6》 can的发送接收引脚是在PA11 PA12,(注意:can和其他的复用) 我找的那个程序,我把原理找到看了一下,can的发送接收是在 PB8 PB9,怀疑是我的板子硬件出错了, 我的板子硬件原理图上是PA11 PA1
C8T6 can端口映射 /
步进电机开环控制和闭环控制的区别 概述: 步进电机是一种特殊的电机,与其他电机不同的是它能够以固定步进角度旋转,能够控制其转速和转向。步进电机常用于控制精度要求比较高的场合,如打印机、数码相机等。而对于步进电机的控制,一般有开环控制和闭环控制两种方法。 开环控制基本概念: 开环控制(Open Loop Control)就是将电脑或其他控制器输出的控制信号直接作用于电机,以期望实现所需的控制任务。开环控制没有反馈回路,不能对步进电机运动实时监测和调整,只能使电机在所给定的控制信号下按照预先设定的步距顺序运行。 优点: 开环控制简单、直观,有较高的自动化水平。 缺点: 在实现控制效果和性价比之间是充满矛盾的,而且误差一般较大。由
从本文开始,将介绍两相双极步进电机和两相单极步进电机的驱动电路,以及两相双极步进电机和两相单极步进电机的驱动方法。首先介绍双极连接和单极连接。 步进电机:双极连接和单极连接 步进电机有双极连接型和单极连接型两种类型,每种都有其优缺点,因此就需要了解它们的特点并根据应用需求来选用。 双极连接 双极连接的方法如图所示,采用电流在一个绕组中双向流动的驱动方式(双极驱动)。这种方式电机的结构最简单,端子数也较少,但由于必须控制一个端子的极性,因此驱动电路较为复杂。不过,这种电机的绕组利用率好,并能进行精细的控制,因此能获得很高的输出转矩。另外,还能减小在线圈中产生的反电动势,所以能使用耐压较低的电机驱动器。 单极
的双极连接和单极连接 /
工业现场中有大量的步进电机应用,比如自动化控制,机器人关节,打印机控制等等。其中应用最广泛的是 混合式步进电机 ,也是我们日常接触到的绝大部分步进电机的形式。在概念上,步进电机和变磁阻电机也存在一定的联系和差别,本文就初步浅谈一下磁阻电机/步进电机的结构和工作原理,并且比较一下不同电机之间的差别。 1、变磁阻电机 变磁阻电机(Variable-Reluctance Machine)也被称为开关磁阻电机,也许是所有电机结构中最简单的电机,由装有励磁绕组的定子和具有凸极结构的铁磁转子构成。转子没有线圈绕组以及永磁体,依靠转子在不同位置磁阻的变化产生电磁力(d/dθ)。 我们大家都知道, 磁通总是倾向穿过磁阻最小的路径。 如图1.1所示
原理 /
此前已经以PM型步进电机为例介绍了步进电机的工作。本文将介绍当今应用广泛的混合式步进电机的结构和工作原理。 混合式步进电机的结构 混合式步进电机是兼具VR型和PM型电机优点的步进电机。VR(Variable Reluctance)型电机使用齿轮状的铁芯作为转子。其优点是能够最终靠机械加工减小步距角,缺点是转矩稍低,难以同时实现小型化和大转矩。而PM(Permanent Magnet)型电机则能够最终靠强力永磁体实现小型化的同时获得转矩,但是在减小步距角方面存在限制。 混合式电机使用VR型结构来实现精细的步距角,并能通过与永磁体相结合来增加转矩,这种电机已被用于众多应用。 转子的基本结构是在两个铁转子之间夹着沿轴向着磁的
的结构和工作原理 /
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 设计的基本要求: 采用定时中断方式控制步进机的转速,定时单位时长为10ms。 速度设置在1/2/3/4四个档位,1档最快,依次递减,能够控制步进电机的停、转和方向,同时显示步进机的当前档位。 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
设计 /
技术及其应用设计研究
驱动技术发展及现状
驱动的研制
信号完整性指南:实时测试、测量与设计仿线FTG的无感正弦波无刷电机驱动电路
【电路】将DHT11温度和湿度传感器与STM32F103C8连接的方法
嵌入式工程师AI挑战营(初阶):基于RV1106,动手部署手写数字识别落地
【下载】LAT1396 STM32CubeIDE实用技巧之STM32H7双核调试的配置
【下载】LAT1343 STM32H5 USBD Classic驱动 CDC移植
【下载】LAT1392 LTDC RGB接口 LCD的TouchGFX工程的移植步骤
【直播】4月11日,STM32Trust如何帮助新产品设计提升信息安全保护能力
【线日,基于Buildroot制作STM32MP13启动镜像-深圳/厦门/西安/郑州/苏州
【新品】STM32U0新一代超低功耗入门级MCU,助力终端产品省电,安全,BOM成本低
【新品】 STM32H7R/S基于Cortex-M7,运行频率高达600 MHz,板载闪存型MCU 拥有高速的外部存储
【新品】STM32WBA54/55 支持BLE5.4、IEEE 802.15.4通信协议、Zigbee®、Thread和Matter协议
【新品】STM32MP2 最高配备双核Arm® Cortex®-A35和Cortex®-M33的STM32MP2系列微处理器
【新品】STM32H5-Arm® Cortex®-M33 内核,主频高达250MHz,提升性能与信息安全性

ST(意法半导体)近日推出了全新的STM32U0微控制器,这款基于Cortex-M0+内核的产品,可以在带有实时时钟(RTC)的待机模式下,实现仅为160n ...
1 DMA概述直接存储器访问 (DMA) :用于在外设与存储器之间以及存储器与存储器之间进行高速数据传输。DMA传输过程的初始化和启动由CPU完 ...
在FreeRTOS中,队列是实现任务之间同步、互斥和通信的一种重要方法(其他的实现方法有:任务通知、事件组、信号量、互斥量)。任何任务都可 ...
01前言本文是上文 《STM32H5 DA 之初体验(带 TrustZone)》的后续之作。倘若你还没有阅读此文,那么建议你先阅读下,然后再回过头来阅读 ...
从51开始,单片机玩了很久了,有51,PIC,AVR等等,早就想跟潮流玩玩ARM,但始终没开始,原因-----不知道玩了ARM可以做什么(对 ...

STM32 高级定时器 输出PWM (用DHT11测得的温度去调节RGB灯的亮度)
航盛与高通基于Snapdragon Ride Flex SoC发布新新一代墨子舱驾跨域融合平台
高通携手中国汽车生态伙伴亮相2024北京车展, 高阶智驾、舱驾融合成果瞩目
【已结束】PI 直播【适合工业市场辅助电源的碳化硅和氮化镓 IC】(9:30入场)
综合资讯51单片机PIC单片机AVR单片机ARM单片机嵌入式系统汽车电子消费电子数据处理视频教程电子百科其他技术STM32MSP430单片机资源下载单片机习题与教程词云: